top of page

System Dynamics and Controls
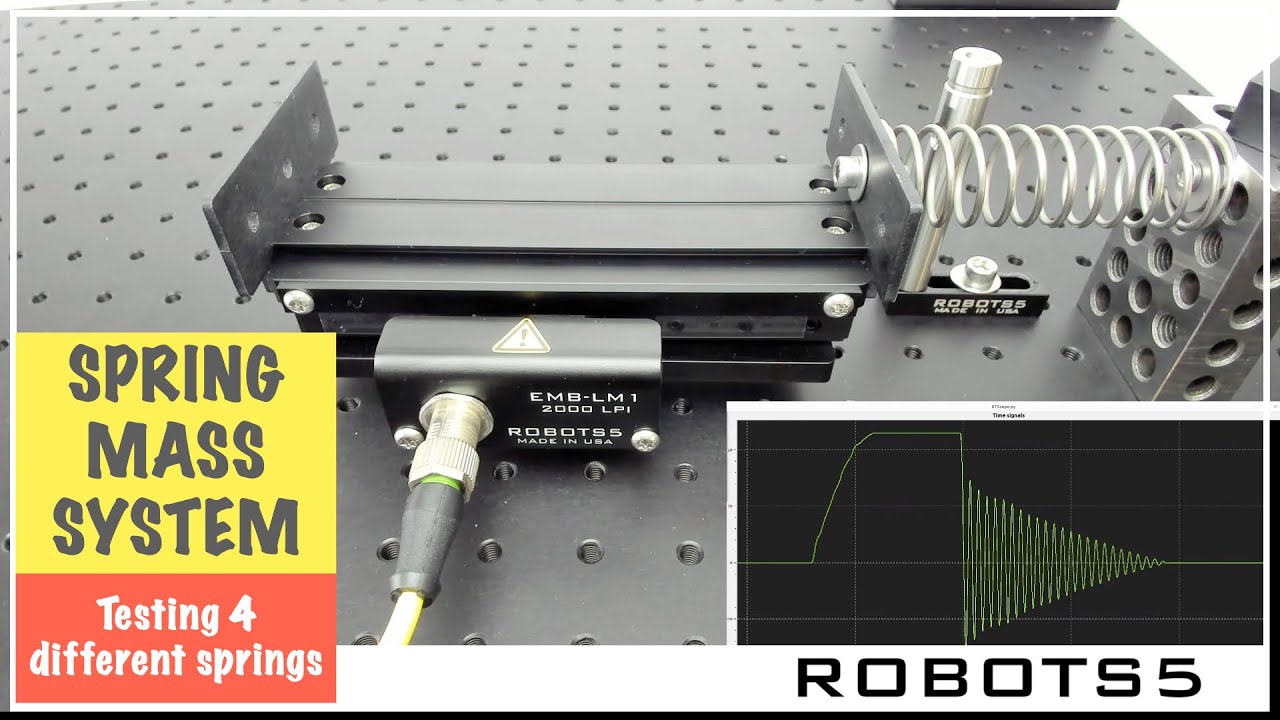
EMB provides the building blocks to create simple and complex plants for dynamic system analysis, modeling, and control. We also offer fully assembled turnkey plants.
Example of plants include a DC motor with gears and an inertia wheel, flexible shaft, belt with spring (flexible spring), spring-mass-damper (linear system), rotary to linear motion with rack and pinion or belt, and MIMO plants with 2 actuators.



























bottom of page